AUTOMATA
Wearable kinetic sculpture & performance
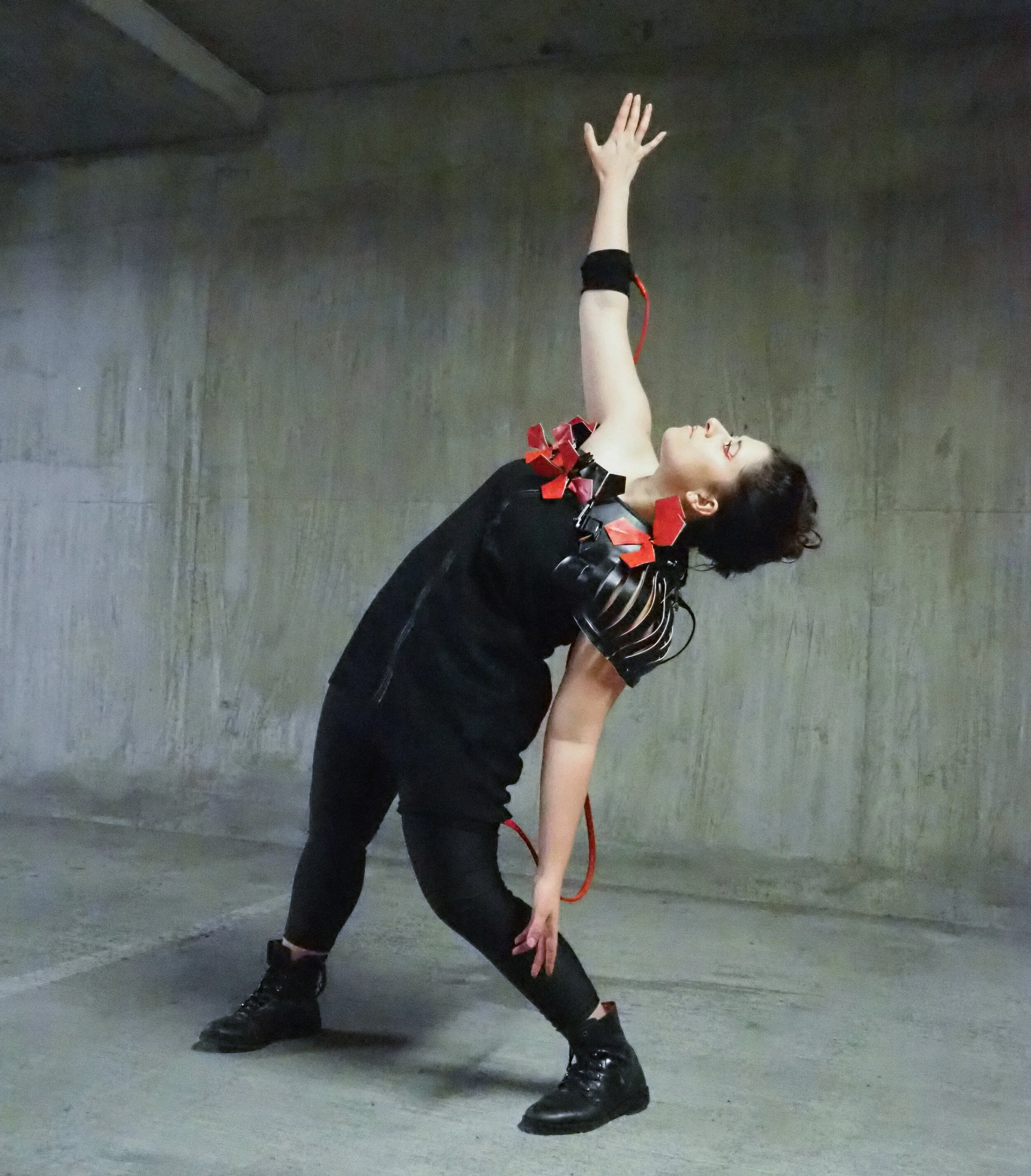
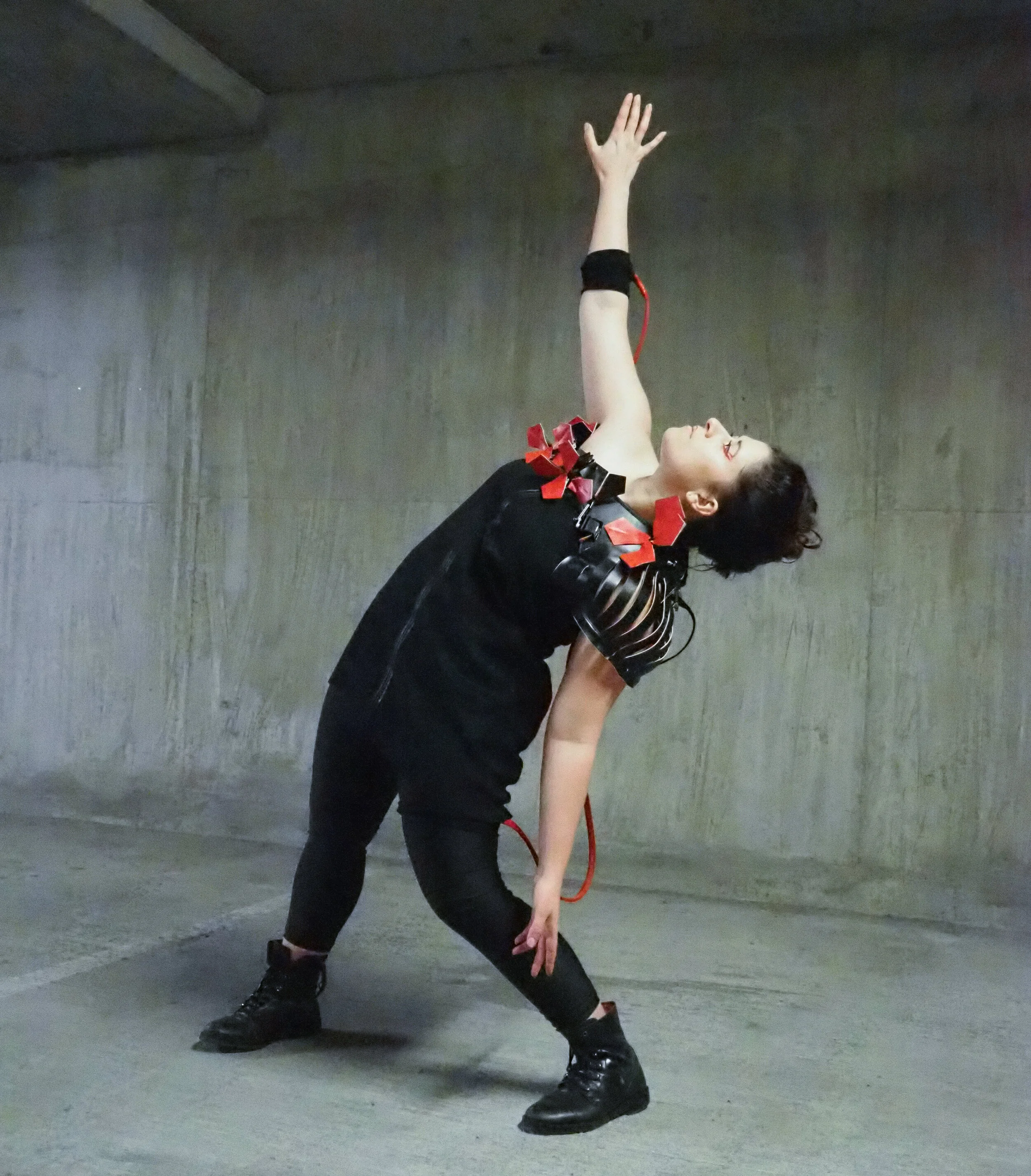
Automata is a performance device that allows the dancer to affect elements of the garment by their movements.
The dancer is wearing an accelerometer on the right arm and another one on the left leg, controlling the movement of 5 ‘flowers’ and the shoulder pad.
The project explores the relationship between puppeteer and object, and the transfer of agency between the two. Is the dancer moving to manipulate the objects or is the movement of the objects influencing the dancer? Who is controlling who?
The initial research started with the intention to move remote objects through choreography. But through the different experiments, it became apparent that the movements of the objects were influencing the choreography as much as the other way around. This led to the creation of a wearable device instead of remote objects and an evolution of the research into exploring the constant dialogue between the machine and the dancer wearing it.
Technical details
The wearable device is made of 7 servos, 2 accelerometers placed on the right arm and left leg, all connected to an Adafruit Metro board, with rechargeable batteries.
The values received on the accelerometers control the movement of 7 servos placed on the outfit, moving the different mechanical parts. Three of the ‘flowers’ and the left shoulder pad are controlled by the right arm. Two other ‘flowers’ are controlled by the left leg.
Particular attention has been put on the analysis of the acceleration values on each axis (X, Y, Z) to determine which one to use and set different thresholds for each servo.
Role: Original concept, Direction, Choreography, Creative Technology, Performance
2019